
基于激光焊缝跟踪传感器的工业机器人焊缝跟踪系统的优缺点

基于激光轮廓传感器的工业机器人焊缝跟踪系统的优点
2021-02-19 10:01
基于激光轮廓传感器的工业机器人焊缝跟踪系统的优缺点
(2020年度)
企业名称:苏州博智慧达激光科技有限公司
填报日期:2021年2月5日
一.总体项目情况概述
开发发那科工业机器人和上位机之间的通讯功能并完成测试。
开发发那科工业机器人和焊缝跟踪传感器的位置标定功能并完成测试。
开发焊接实时跟踪的图像预处理功能并完成测试。
开发常用焊缝的识别算法并完成测试,整机联调并整体优化,完成常规焊缝跟踪的应用测试。
二、本年度项目工作和进展情况
1.焊缝图像预处理的优化
针对焊接现场飞溅,烟雾干扰非常的问题进行了原始数据的预处理优化。详见图1,图2。
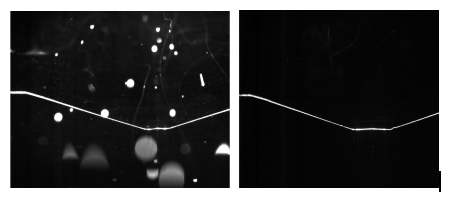
结 论
对现场的焊接干扰进行原始数据预处理之后,后续的提取焊缝算法可以更加稳定的工作,提高系统的整体性能。
2.焊缝识别的优化
增加各类常规焊缝的识别算法并进行优化,如图3,图4。
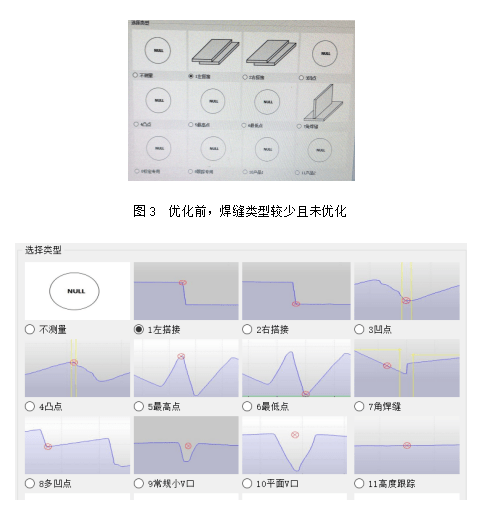
图4 优化后,焊缝类型丰富且稳定
三、总 结
基于激光轮廓传感器的工业机器人焊缝跟踪系统的优点
1.省略大量的人工示教操作,让机器人焊接更简单
对于传统焊接来说,焊接过程中需要大量的示教工作,特别是变形量大的工件难以完全自动化焊接。但是基于激光轮廓传感器的工业机器人焊缝跟踪系统就很好地解决了这个问题。人员不需要重复示教系统即可稳定工作。
2. 可实现多种常规焊缝的识别
针对常规焊缝采用专家识别模式可以相对的定位焊接位置,焊缝类型的的扩展也比较方便,可以根据现场需要灵活的调整识别方式。
3.便于焊接自动化的拓展
基于激光轮廓传感器的工业机器人焊缝跟踪系统不仅可以在焊接环节引导的焊接,在焊接后的焊缝质量检测上也可有一定的发挥空间。
基于激光轮廓传感器的工业机器人焊缝跟踪系统的缺点
1.当前模式下调整和使用比较复杂,增加了对使用人员的技术素质要求
对于基于激光轮廓传感器的工业机器人焊缝跟踪系统来说,除了要求操作人员熟悉机器人系统外,还要对上位机软件系统进行全面把握,灵活的调整各种参数才可以达到较好的使用效果。不过考虑到目前工业智能化潮流的到来,相关人员的技能在逐步提升,这一点尚不是Zui大缺陷。
- 焊缝跟踪:博智慧达激光视觉焊缝系统可以无缝对接宝元系统的焊接机器人 2019-08-15
- 激光轮廓测量仪的测量原理和应用领域 2018-04-06
联系方式
- 地址:苏州 苏州新区泰山路2号博济科技园
- 电话:0512-66656901 13771763950
- 联系人:王艳
- 手机:15850004665
- QQ:391533441
- Email:15850004665@126.com